
Q.uick Start Guide: Connecting a Gantner EtherCAT Controller with an EtherCAT Master in TwinCAT
Purpose
This guide will describe configuring an EtherCAT Master in TwinCAT to get online values from a Gantner Instruments EtherCAT controller (i.e., Q.station, Q.pac EC).
This configuration was tested with the following versions:
TwinCAT can be downloaded from the BECKHOFF homepage:
http://www.beckhoffautomation.com/english/twincat/tcatdow.htm?id=159876032042844
Procedure
- After installing TwinCAT, connect the PC to the EtherCAT input of the device with an Ethernet cable.
- Copy the configuration file (XML file) to the TwinCAT directory.
Location of the XML file:
c:\Users\Public\Documents\Gantner Instruments\GI.bench\additionals\EtherCAT\
or
C:\Program Files\Gantner Instruments\test.commander\Additionals\EtherCAT\Gantner Instruments.xml
Location of the TwinCAT directory:
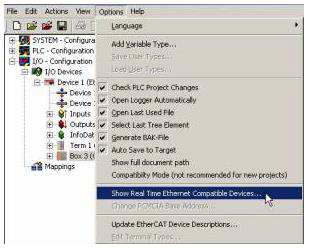
C:\Program Files\TwinCAT\Io\EtherCAT - After starting TwinCAT (System Manager), check if a TwinCAT-compatible RT-Ethernet adapter is installed. Options > Show Real-Time Ethernet Compatible Devices
- In the next window, at least one Ethernet Adapter has to appear in the “Installed and ready to use devices.”
- Make sure, that the Fieldbus interface of the connected Gantner Device is set to EtherCAT.
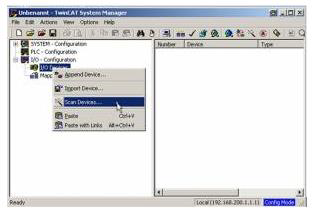
- The connected device has to be scanned. Right-click on “I/O Devices,” select the network device (checkbox on EtherCAT), and allow “Scan for boxes” and “Activate Free Run.”
- At “I/O Devices” a new device is created. The correct channel data has to be uploaded from the controller. Select the device (Example: Q.pac EC) so that the correct index tabs appear in the right window. In the “CoE-Online” tab, click on the button “Advanced.”
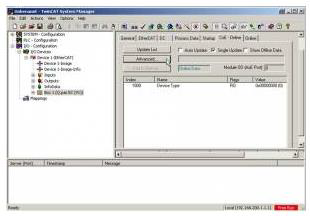
- To get the actual data of the device, the checkbox “Online – via SDO Information” has to be activated.

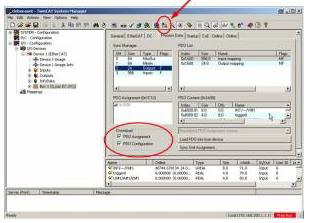
- After confirming the dialog box by clicking OK, the settings will be uploaded via the “Process Data” tab. Activate the check boxes “PDO Assignment” and “PDO Configuration” in the Download section of this tab and click on “Load PDO info from device.”
- The online measurement values will appear in the lower channel list when reloading the I/O device by clicking on the symbol in the speed button bar (or pressing F4).
Run-Mode
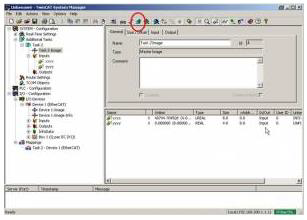
- After the Master is configured as described above, an additional task has to be created, and “Auto Start” has to be activated.

- Input variables can be inserted (Example: xxxx and yyyy) by right-clicking on “Inputs.” These variables must be configured accordingly to the desired Controller-Variable with the corresponding data type. This variable can then be linked to a Controller-Variable by clicking the “Linked to” button.
- To activate the Configuration and switch to Run-Mode, click the “Activate Configuration” button in the speed button bar.
Update EEPROM
It may be necessary to update the EEPROM of the controller since the Controller itself has no access to this memory. The new file has to be downloaded to the EtherCAT chip via TwinCAT (or another EtherCAT Master).
The EEPROM can be found in the following directory:
C:\Program Files\Gantner Instruments\test.commander\Additionals\EtherCAT
Make sure to choose the correct file that corresponds to the controller type.
Procedure
- The device has to be found via “Scan Devices” and select the connected device. Process-image does not need to be loaded
- Select the tab “EtherCAT” and click on “Advanced Settings” > ESC Access > EEPROM > Hex Editor
- With the “Read from File” button, the new EEPROM can be loaded
- Click “Download” to download the file to the device
- Restart the controller (i.e., unplug the power supply)

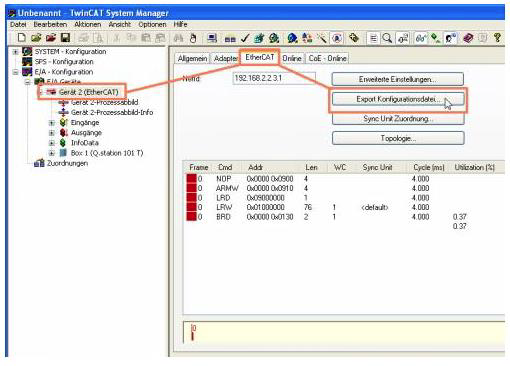
Export EtherCAT Network Information
The ENI (EtherCAT Network Information) is created based on EtherCAT Slave Information files (ESI) which the vendors of the EtherCAT Master device provide. To export the file for a EtherCAT Master Stack choose “Export Configuration File”.
EtherCAT Slave Information (ESI)
The ESI file for Gantner EtherCAT slaves is included in the test.commander installation:
C:\Program Files\Gantner Instruments\test.commander\Additionals\EtherCAT\Gantner Instruments.xml
This file contains global EtherCAT information of Gantner devices but no information about
input/output channel setup. Gantner devices do not have a fixed channel setup as another EtherCAT slave (i.e., Beckhoff), where the complete setup is already described in the ESI file.
The EtherCAT configuration tool reads the necessary information online provided by the slaves in their EEPROM and their object dictionaries via CoE.
The basic EtherCAT Network Architecture looks like this:

When working with Gantner EtherCAT Slaves, the EtherCAT Master should at least provide the following features:
- Handle ENI files, which can be generated with the TwinCAT EC configurator
- Read object dictionaries via CoE